 Xiao-Wei Gao
Xiao-Wei Gao Wei-Wu Jiang
Wei-Wu Jiang Xiang-Bo Xu
Xiang-Bo Xu- School of Aeronautics and Astronautics, Dalian University of Technology, Dalian, China
In this article, the progress of frequently used advanced numerical methods is presented. According to the discretisation manner and manipulation dimensionality, these methods can be classified into four categories: volume-, surface-, line-, and point-operations–based methods. The volume-operation–based methods described in this article include the finite element method and element differential method; the surface-operation–based methods consist of the boundary element method and finite volume method; the line-operation–based methods cover the finite difference method and finite line method; and the point-operation–based methods mainly include the mesh free method and free element method. These methods have their own distinctive advantages in some specific disciplines. For example, the finite element method is the dominant method in solid mechanics, the finite volume method is extensively used in fluid mechanics, the boundary element method is more accurate and easier to use than other methods in fracture mechanics and infinite media, the mesh free method is more flexible for simulating varying and distorted geometries, and the newly developed free element and finite line methods are suitable for solving multi-physics coupling problems. This article provides a detailed conceptual description and typical applications of these promising methods, focusing on developments in recent years.
Introduction
Most engineering problems can be represented by a set of second-order partial differential equations (PDEs) with relevant boundary conditions (B.C.), named the boundary value problem (BVP) of PDEs [1, 2]. For example, in thermal engineering, the diffusion-convection problem usually has the following BVP [3]:
where T is the temperature,
For solid mechanics problems, the BVP can be expressed as follows [4].
where
To solve the BVPs presented above, numerous numerical methods have been developed [5], which can be globally divided into four categories according to geometry discretisation and operation dimensions: volume-operation–based methods (including the finite element method [6, 7], finite block method [8], element differential method [4], etc.), surface-operation–based methods (including the boundary element method [9, 10], finite volume method [11], etc.), line-operation–based methods (including the finite difference method [12], finite line method [13], etc.), and point-operation–based methods (including the mesh free method [14], free element method [15], fundamental solution method [16], etc.). The classification of numerical methods into four categories as described above can help to deeply understand the innate characteristics of the various numerical methods. In these four types of numerical methods, most have two kinds of algorithms, the weak-form and strong-form algorithms [5]. As described in the article, the weak-form algorithms can be established by the weighted residual formulation, which requires integration over elements or divided sub-domains. Strong-form algorithms are based on the point collocation technique, which usually does not require integration computation. These four types of numerical methods will be described in the following sections.
Volume-Operation–Based Methods (VOBM)
Volume-operation–based methods refer to the methods performing the operations of PDEs based on a discretisation model that has the same size as the problem itself, i.e., 2 for two-dimensional (2D) and 3 for three-dimensional (3D) problems. The most commonly used VOBM is the finite element method (FEM), which is based on volume discretisation for 3D problems and plane region discretisation for 2D problems, respectively. In FEMs, the Galerkin FEM is the dominant method [6, 17], which establishes the solution scheme by using a variational principle in most publications. Nevertheless, as described in the article, all the weak-form algorithms, including the Galerkin FEM, can be derived by the weighted residual technique in a unified way, which will be described in the following.
Weighted Residual Formulation for Solving BVPs of PDEs
In the following, we take solid mechanics as a demonstration example for setting up the weighted residual formulation. To do this, multiplying the PDE (3) on both sides by a weight function w and integrating it through the computational domain
Taking integration by parts and applying Gauss’ divergence theorem to the first domain integral of Eq. 5, the above equation becomes:
where
In Eq. 6, the basic physical variable
In Eq. 7, the basic physical variable
It is noted that Eqs 6, 7 are valid for any sized closed domain
Weak-Form Finite Element Method (WFEM)
In FEM, the computational domain is discretized into a series of elements [6, 7] with a certain number of nodes. Usually, the nodes on the element interfaces should be linked point-to-point, as shown in Figure 1, for a 2D computation FEM model. Over each element, the displacement
where the repeated index α represents summation through all element nodes.
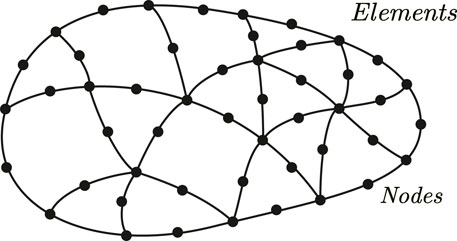
FIGURE 1. Elements of a 2D FEM model.
Galerkin Finite Element Method (GFEM)
In the Galerkin FEM, the weight function w in Eq. 6 is taken as the shape function
where the left-hand side is related to the so-called element stiffness term and the right-hand side is the total equivalent load of element e.
We assume that the problem is discretized as N computational points, and each point is shared by a number of elements. Thus, for a point n, assembling all related elements’ contributions from Eq. 9, it follows that
where
In Eq. 10, the equivalent traction load, the second term in Eq. 10, has different values for interface and out boundary points, i.e.,
where
When n in Eq. 10 goes through all the N points, the following system of equations can be produced in the matrix form:
where K is the global stiffness matrix, u the displacement vector, and F the total equivalent load vector.
The Galerkin FEM results in a symmetric and a banded sparse coefficient matrix K in the system of equations; this makes the method very efficient and stable. In particular, when some modern techniques are integrated into FEM, such as the control volume finite-element method [18, 19], isogemetric technique [20, 21], and gradient smoothing technique [22, 23], quite complicated engineering problems can be efficiently solved. Moreover, in recent years, a number of newly proposed FEMs have been developed, as described below.
Surface-Volume–Based Finite Element Method (SVFEM)
The Galerkin FEM presented above is derived based on the volume-based weighted residual formulation (6). In the article, another type of FEM can be generated based on the surface-volume–based weighted residual formulation (7), which has the same element discretisation as Figure 1. To do this, as done above, by applying Eq. 7 to an element domain, say element e, and by using
Similar to Eq. 10, for the computational point n, assembling all related elements’ contributions from Eq. 13, the following equation can be formed:
The right-hand side of Eq. 14 is exactly the same as that of the standard Galerkin FEM, as shown in Eq. 11.
When n in Eq. 14 goes through all the N discretized points, the following system of equations can be produced in the matrix form:
In the above equation,
Although
The SVFEM presented above is included in the new research work by the article’s authors. Some results have not yet been published in the literature; however, and they will be put in the public domain in the near future.
Strong-Form Volume-Operation–Based Methods
The above-described Galerkin FEM and SVFEM are weak-form algorithms, which require integration over elements to form the system of equations. In recent years, new types of strong-form FEM-like volume-operation–based methods have been proposed, which belong to a type of element collocation method and do not need integration computations. However, the stability of the strong-form algorithms is usually not as good as the weak-form algorithms, although for general problems these algorithms can still give satisfactory results.
Wen and Li et al. [8, 24] proposed the finite block method (FBM) in 2014, in which isoparametric element-like blocks are used to compute the first-order partial derivative of physical variables with respect to the global coordinates. FBM has the advantage of simple coding, and since element-like blocks are used, the stability of the solution is usually good. On the other hand, since all nodal values of physical variables over each block are independently inserted into the system of equations by introducing a consistent condition of physical variables and an equilibrium condition of the physical variable gradient in the system, there are more unknowns in the formed final system of equations than other frequently used numerical methods in the case of the same number of total nodes. In view of this issue, as few blocks as possible should be used when solving a problem using FBM to ensure that the final system of equations is not so large.
In the same period, Fantuzzi et al. [25, 26] proposed another type of strong-form FEM (SFEM), in which a set of formulations computing the first- and second-order spatial partial derivatives are derived for 2D problems and are used to collocate the governing PDEs in solid mechanics. In SFEM, the continuity condition among elements is determined by the compatibility, and a mapping technique is used to transform both the governing differential equations and the compatibility conditions between two adjacent sub-domains into the regular master element in the computational space. As in FBM, the treatment of the compatibility and equilibrium conditions between elements is still complicated; this makes SFEM not as flexible as GFEM when solving complicated engineering problems.
In 2017, Gao et al. [27] proposed a new type of strong-form FEM, called the Element Differential Method (EDM), for solving heat conduction problems, and later it was successfully used to solve solid mechanics [4, 28], electromagnetic [29], and thermo-mechanical-seepage coupled [30] problems. As in FBM, Lagrange polynomials are used to construct high-order elements in EDM. The essential difference between EDM and FBM is that both the first- and second-order partial derivatives were derived for 2D and 3D problems in EDM. The following is a brief review of EDM.
Looking back at Eq. 8 for physical variable interpolation over an element, the global coordinates can also be expressed by their nodal values and shape functions, as follows:
Based on Eqs 8, 16, the following expressions can be derived for the first- and second-order partial derivatives [4, 27]:
where
where
The main advantage of the strong-form FEMs over weak-form FEMs is that the derived spatial partial derivatives can be directly substituted into the problem’s PEDs and B.C. to set up the system of equations. For example, by using Eqs 17, 18, the PDE and B.C. for the solid mechanics shown in Eqs 3, 4 can be directly used to generate the following discretized equations:
In the above equations,
where
Surface-Operation–Based Methods
Surface-operation–based numerical methods include the finite volume method (FVM), boundary element method (BEM), etc., which are operated mainly on the surfaces of a control volume or on the boundary of the considered problem.
Finite Volume Method (FVM)
The FVM looks like a volume-based method [32–35]. However, in this article, it is classified into the category of surface-operation–based methods. This is because its main operation is over the surfaces of the control volume, rather than on the volume itself. To see this, let us take the weight function w to be 1 in Eq. 6. This results in the following:
In FVM, the computational domain is discretized into a series of control volumes [32]. Applying Eq. 23 to each control volume, say volume
where
Equation 24 is a typical formulation of FVM, from which we can see that the main computation is over the control surfaces of a control volume. The key work in FVM is the evaluation of the physical variable gradient
Free Element-Based FVM (FEFVM)
In [15], the free element method (FrEM) was proposed for thermal-mechanical analysis. In FrEM, the isoparametric elements used in FEM are defined at each collocation point, as shown in Figure 2. The weak-form formulation of FrEM has the form shown in Eq. 24 [31]; however, the control volume is taken as the free element, as shown in Figure 2. Generally, for a free element, some of its operation surfaces are located inside the domain and some on the outer boundary of the problem, as shown in Figure 2. For this case, both the inner surface integral over
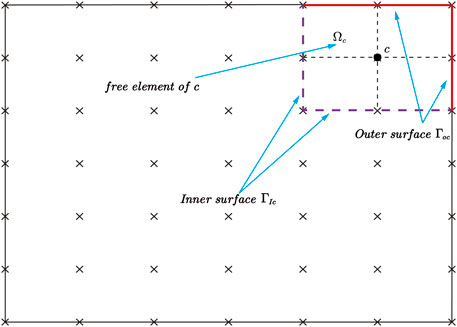
FIGURE 2. Operation surfaces
However, when all the surfaces of the free element formed for the collocation c are located within the problem, as shown in Figure 3, only the inner surface integral exists.
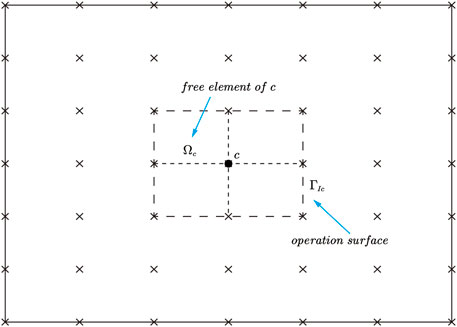
FIGURE 3. Operation surface
In this case, Eq. 24 takes the following form:
Since high-order free elements can be easily formed in FrEM [15], a high accuracy of
Element-Shell Enhanced FVM (ESFVM)
To improve the accuracy of
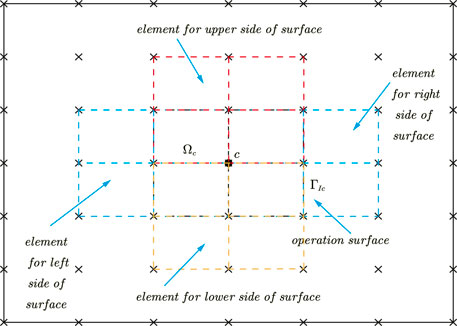
FIGURE 4. Free elements around the operation surfaces.
In this strategy, the inner surface integral included in Eq. 24 can be written as follows:
where
where
In ESFVM, since the operation surfaces of
Evaluation of the Domain Integral Involved in FVM
When the body force is considered in the computational problem, the FVM equations inevitably involve the domain integrals, as shown in Eqs 23–25. Evaluation of the involved domain integrals is troublesome work. In conventional FVM, for achieving high efficiency, the domain integral is evaluated by assuming that the body force is constant throughout the control volume [41]. Thus, the domain integral can be simply written as
where
Obviously, if
where
For most cases,
The above equations are suitable for any shaped control volume, regular or irregular, since the integration is over the boundary of
Boundary Element Method (BEM)
In Eq. 7, if the weight function w is taken as the displacement fundamental solution
Recalling that the displacement fundamental solution
Equation 31 becomes
where
To evaluate the domain integral appearing in Eq. 33, the conventional technique is to discretize the domain into internal cells [9]; however, this eliminates the advantage of BEM where only the boundary of the problem needs to be discretized into elements. To overcome this drawback, a transformation technique is usually employed to transform the domain integral into an equivalent integral. The most extensively used transformation technique is the Dual Reciprocity Method [DRM] [43]. Another technique used is the Radial Integration Method (RIM) [42], which can give more accurate results than DRM.
Using RIM, the domain integral in Eq. 33 can be expressed as
where the radial integral is
where n = 1 for 2D problems and n = 2 for 3D problems. When
Line-Operation–Based Methods
Line-operation–based methods include the conventional finite difference method (FDM) [12] and the recently proposed finite line method (FLM) [3, 13]. In these methods, the computational domain is discretized into a series of points and lines formed by around points are then used to compute the spatial partial derivatives included in the PDEs, as shown in Figure 5 for a 2D case. FDM constructs the first- and second-order partial derivatives using a line of points along the derivative directions. The main drawback of FDM is that if the lines that define the derivative directions are not orthogonal to one another in 2D or 3D problems, the accuracy of the cross-partial derivatives of different directions is usually very poor [45, 46]. This is why FDM cannot simulate irregular geometry problems well. In contrast, FLM has a much better performance in overcoming this drawback.
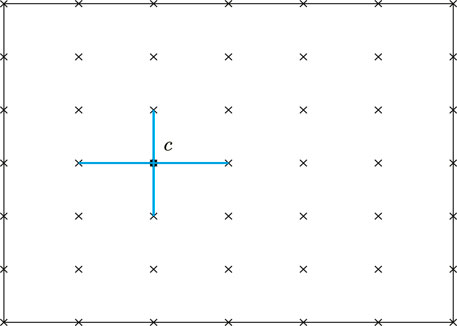
FIGURE 5. Line-set consisting of two crossed lines for a 2D problem.
FLM uses a number of lines, named a line-set, to set up the solution scheme. Usually, at a collocation point, two lines (for 2D problems) or three lines (for 3D problems) are used to form the line-set, as shown in Figure 5. Figure 6 shows the high-order line-sets of an internal collocation point for 2D and 3D problems.
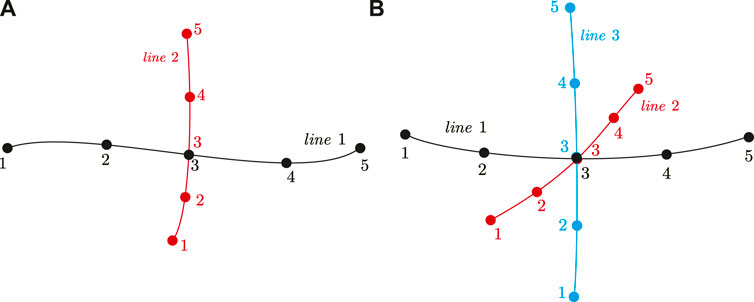
FIGURE 6. Node distributions over line-sets defined at 2D or 3D internal points. (A) 2D problem (B) 3D problem.
Along a line of a line-set, the coordinates and physical variables can be expressed as
where m is the number of nodes defined along a line of the line-set, l is the arclength measured from node 1, and
By differentiating Eqs 37, 38 with respect to l, we can obtain expressions for computing the first- and second-order partial derivatives at the collocation point
where
where the repeated indexes represent summation, and d = 2 for 2D problems, d = 3 for 3D problems, and I represents the line number.
Using Eqs 40, 41, we can easily discretize a PDE and the related boundary conditions. For example, the PDE for the solid mechanics shown in Eqs 3, 4 can directly generate a set of discretized equations which have the same forms as those shown in Eqs 20, 21.
Point-Operation–Based Methods
Point-operation–based methods cover a number of numerical methods, such as the mesh free method (MFM) [5, 47–50], fundamental solution method [16], radial basis function method [51–53], and the newly developed free element method (FrEM) [15, 31]. In these types of methods, the computational domain is discretized into a series of points and solution schemes are established by collocating the governing PDEs or their integral forms at each collocation point. In MFM, the partial derivatives at the collocation point c are derived based on a group of scatter points within a specified support region around c, as shown in Figure 7A, while in FrEM, partial derivatives are derived based on an isoparametric element freely formed for point c, as shown in Figure 7B. In MFM and FrEM, both weak-form and strong-form solution schemes are available. In the following sections, the two schemes of FrEM will be described in detail.
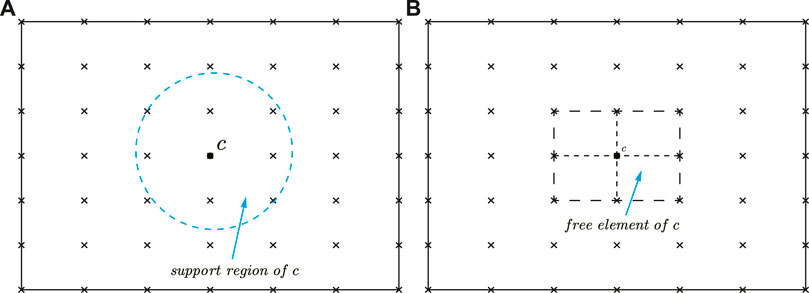
FIGURE 7. 2D patterns for MFM (A) and FrEM (B) at a collocation point.
Weak-Form Free Element Method (WFrEM)
In FrEM, a free element is independently formed for each collocation point c [31], with the domain denoted by
where the derivatives of the shape functions are computed using Eq. 19a.
Dividing the boundary
where
From Eq. 45, it can be seen that the form of the basic equation in WFrEM is similar to that in the conventional FEM. The essential difference between them is that the element in WFrEM is freely formed at each collocation point, the nodes of which are not restricted to any particular nodes of adjacent elements. It is also noteworthy that the free elements formed by around-collocation points are overlapped in FrEM since they are formed locally and independently at each point.
Strong-Form Free Element Method (SFrEM)
The SFrEM is a type of collocation method [15]. To achieve a highly accurate result, the collocation point c should be placed inside the formed free element. For this reason, the free elements used should have at least one internal node. In principle, any type of isoparametric elements with internal nodes can be utilized in SFrEM analysis [54–56]. For example, Figure 8 shows new types of quadratic triangular and tetrahedral elements [55] and Figure 9 shows a 21-noded block element [15].
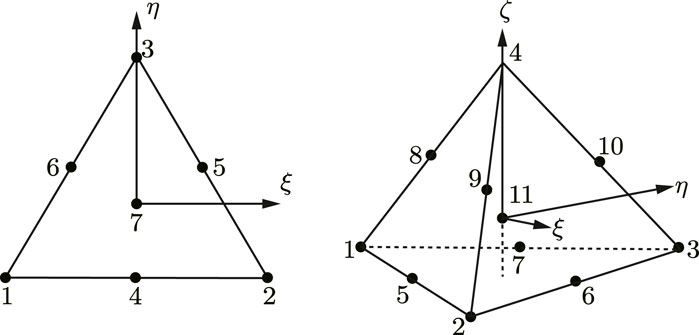
FIGURE 8. Quadratic 7-noded triangular and 11-noded tetrahedral elements.
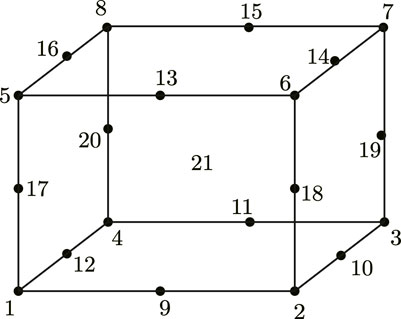
FIGURE 9. 21-noded 3D quadratic block element.
The shape functions for the above triangular and tetrahedral elements can be found in [55] and that for the 21-noded quadratic block element in [15].
For higher-order elements, the best method is to use Lagrange elements. For example, Figure 10 shows a 16-noded 2D third-order Lagrange element.
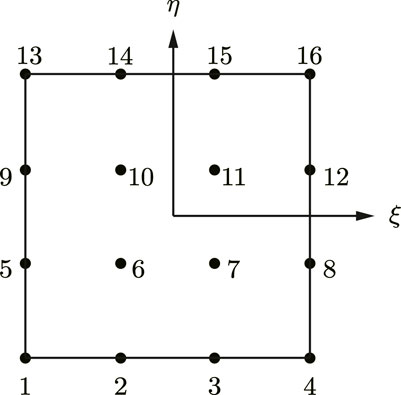
FIGURE 10. 16-noded 2D third-order Lagrange element.
The shape functions of Lagrange elements for 2D and 3D problems can be constructed as follows [4]:
where
From the shape functions shown in Eq. 46, the analytical expressions for computing the first- and second-order partial derivatives can be derived, which are the same as those shown in Eqs 17–19a, 19b. The collocation scheme to form the system of equations for the governing PDEs is the same as that in EDM, shown in Eqs 20, 21, the difference being that in SFrEM, only the interior and out boundary nodes are used.
Numerical Examples
To demonstrate the performances of some of the numerical methods described in the article, a dual-struts supersonic combustor [57] is simulated in the following. The physical problem and relevant dimensions are shown in Figure 11. The Yong’s modulus and Poison ratio of all materials in the problem are taken as
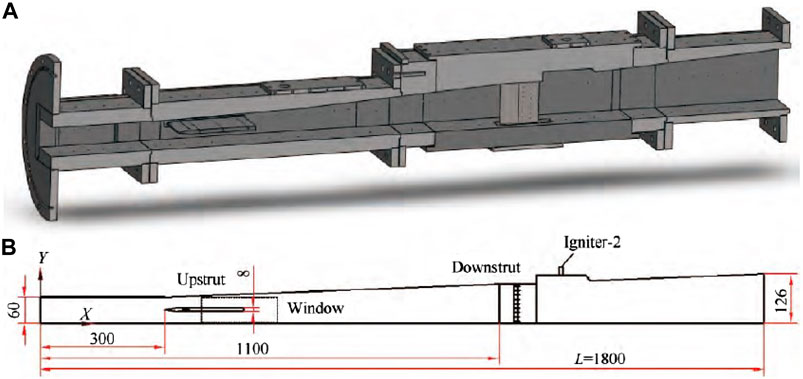
FIGURE 11. Configurations of a combustion chamber with tow struts.
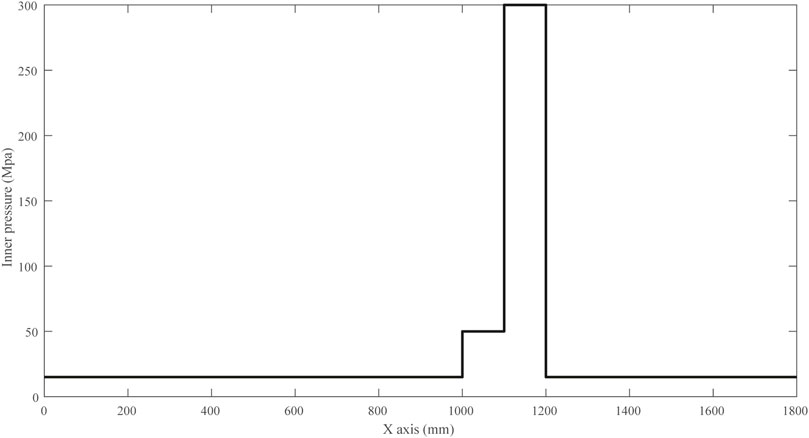
FIGURE 12. Pressure applied on the inner surfaces of the combustor.
To simulate the problem using some of the described methods above, the whole structure is discretized into different numbers of nodes. Figure 13 shows the computational mesh connected by all finite lines in the FLM model with 657,582 nodes. Figure 14 shows a contour plot of the computed displacement amplitude over the deformed FLM mesh, with displacements enhanced ×20. For comparison, the problem is also computed using the FEM software ABAQUS, employing the same level nodes as those used in FLM. Figure 15 shows the comparison of the computed displacement amplitude along the line MN using four different methods; ABAQUS (FEM), finite line method (FLM), weak-form free element method (WFrEM), and the strong-form method (SFrEM). For the last two methods, two meshes with different numbers of nodes are used, in which WFrEM-880k indicates the result of WFrEM using 880,000 nodes. To clearly examine the differences between the different methods, Figure 16 shows the enhanced curves along two local parts of the line MN.
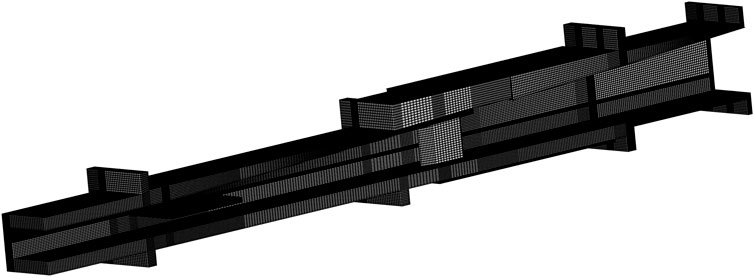
FIGURE 13. Computational mesh used in FLM analysis.
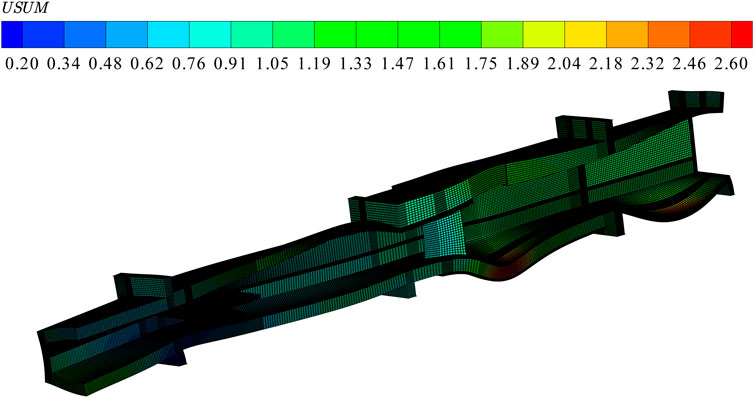
FIGURE 14. Contours of the deformed mesh, with displacements multiplied ×20.
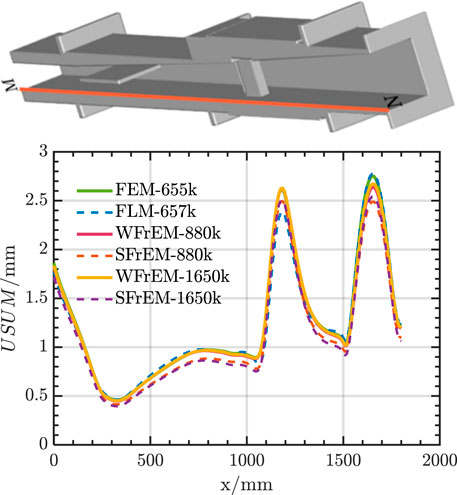
FIGURE 15. Computed displacements along the line MN using the four different methods.
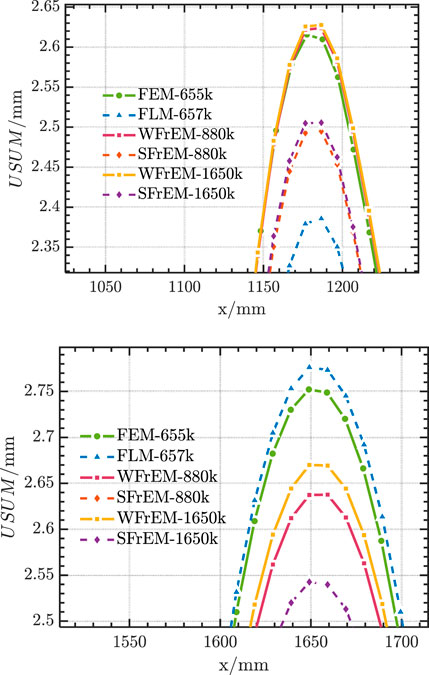
FIGURE 16. Enhanced curves along two parts of line MN.
From Figure 14, it can be seen that the deformations of two areas after the struts are large. This is because the combustion occurs immediately after the two struts; thus, the temperature and pressure are higher in these areas than other areas. Moreover, from Figure 15, it can be seen that all the computed results are in good agreement globally; this indicates that the methods presented in the article can handle real, complicated engineering problems. On the other hand, from Figure 16, it can be observed that the weak-form free element method (WFrEM) and the finite line method (FLM) give results closer to the finite element method (FEM). The essential reasons for this are that in WFrEM, numerical integration is performed over each free element, which is similar to FEM, giving very stable and accurate results. In FLM, the recursive technique is employed to evaluate the high-order derivatives, as shown in Eq. 43, making more points contribute to each collocation point [3]; therefore, more stable and accurate results can be obtained using FLM over other strong-form solution schemes [50].
Summary
In this article, four types of numerical methods are overviewed, most of which are newly proposed methods in recent years. Classification of all numerical methods into volume, surface, line, and point operation methods is performed for the first time in this article. This classification is conceptually clear and helpful for readers to understand the discretisation of problems and to realize the advantages and disadvantages of the different methods. Computational experience shows that the finite element, weak-form free element, and finite line methods have excellent performances.
Author Contributions
X-WG: conceptualization; investigation; methodology; software; project administration; resources; writing- original draft; supervision. W-WJ: software; validation; writing—review and editing; X-BX, H-YL, KY, JL, and MC: writing—review and editing. All authors contributed to the article and approved the submitted version.
Funding
We gratefully acknowledge support of this investigation by the National Natural Science Foundation of China under Grant No. 12072064 and the Fundamental Research Funds for Central Universities under Grant No. DUT22YG204.
Conflict of Interest
The authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
References
1. Coleman, C. J., On the use of radial basis functions in the solution of elliptic boundary value problems. Comput Mech (1996) 17:418–22. doi:10.1007/BF00363985
2. Wang, Z. G., Liu, L. S., and Wu, Y. H., The unique solution of boundary value problems for nonlinear second-order integral-differential equations of mixed type in Banach spaces. Comput Math Appl (2007) 54:1293–301. doi:10.1016/j.camwa.2007.04.018
3. Gao, X. W., Ding, J. X., and Liu, H. Y., Finite line method and its application in coupled heat transfer between fluid-solid domains. Acta Phys Sin (2022) 71(19):190201. doi:10.7498/aps.71.20220833
4. Gao, XW, Li, ZY, Yang, K, Lv, J, Peng, HF, Cui, M, et al. Element differential method and its application in thermal-mechanical problems. Int J Numer Methods Eng (2018) 113(1):82–108. doi:10.1002/nme.5604
5. Liu, GR. An overview on meshfree methods: For computational solid mechanics. Int J Comp Meth-sing (2016) 13(5):1630001. doi:10.1142/S0219876216300014
6. Zienkiewicz, OC, Taylor, RL, and Fox, DD. The finite element method for solid and structural mechanics. Amsterdam: Elsevier (2014). p. 624.
7. Hughes, TJR. The finite element method: Linear static and dynamic finite element analysis. Englewood Cliffs, NJ, USA: Prentice-Hall (1987). 704.
8. Wen, PH, Cao, P, and Korakianitis, T. Finite block method in elasticity. Eng Anal Bound Elem (2014) 46:116–25. doi:10.1016/j.enganabound.2014.05.006
9. Brebbia, CA, and Dominguez, J. Boundary elements: An introductory course. London, UK: McGraw-Hill Book Co (1992). 860.
10. Gao, XW, and Davies, TG. Boundary element programming in mechanics. Cambridge, UK: Cambridge University Press (2002). 253.
11. Onate, E, Cervera, M, and Zienkiewicz, OC. A finite volume format for structural mechanics. Int J Numer Meth Eng (1994) 37(2):181–201. doi:10.1002/nme.1620370202
12. Wang, H, Dai, W, Nassar, R, and Melnik, R. A finite difference method for studying thermal deformation in a thin film exposed to ultrashort-pulsed lasers. Int J Heat Mass Tran (2006) 51:2712–23. doi:10.1016/j.ijheatmasstransfer.2006.01.013
13. Gao, XW, Zhu, YM, and Pan, T. Finite line method for solving high-order partial differential equations in science and engineering. Part Diff Eq Appl Math (2023) 7:100477. doi:10.1016/j.padiff.2022.100477
14. Atluri, SN, and Shen, SP. The meshless local Petrov-Galerkin (MLPG) method. Henderson, NV, USA: Tech Sci (2002). 51.
15. Gao, XW, Gao, LF, Zhang, Y, Cui, M, and Lv, J. Free element collocation method: A new method combining advantages of finite element and mesh free methods. Comput Struct (2019) 215:10–26. doi:10.1016/j.compstruc.2019.02.002
16. Fan, CM, Huang, YK, Chen, CS, and Kuo, SR. Localized method of fundamental solutions for solving two-dimensional Laplace and biharmonic equations. Eng Anal Bound Elem (2019) 101:188–97. doi:10.1016/j.enganabound.2018.11.008
17. Belytschko, T, Liu, WK, Moran, B, and Elkhodary, K. Nonlinear finite elements for continua and structures. New York, USA: John Wiley and Sons (2000). 650.
18. Baliga, BR. A control-volume based finite element method for convective heat and mass transfer. [PhD’s thesis]. Minnesota: University of Minnesota (1978).
19. Schneider, GE, and Raw, MJ. Control volume finite-element method for heat transfer and fluid-flow using colocated Variables.1.Computational procedure. Numer Heat Tr (1987) 11(4):363–90. doi:10.1080/10407798708552552
20. Hughes, TJR, Cottrell, JA, and Bazilevs, Y. Isogeometric analysis: CAD, finite elements, NURBS,exact geometry and mesh refinement. Comput Methods Appl Mech Eng (2005) 194:4135–95. doi:10.1016/j.cma.2004.10.008
21. Hou, WB, Jiang, K, Zhu, XF, Shen, Y., Li, Y, Zhang, X, et al. Extended Isogeometric Analysis with strong imposing essential boundary conditions for weak discontinuous problems using B++ splines. Comput Method Appl Mech Eng (2020) 370. doi:10.1016/j.cma.2004.10.008
22. Liu, GR, and Nguyen, TT. Smoothed finite element methods. Boca Raton, FL, USA: Chemical Rubber Co (2010). 692.
23. Chen, L, Liu, GR, and Zeng, KY. A combined extended and edge-based smoothed finite element method (es-xfem) for fracture analysis of 2d elasticity. Int J Comput Methods (2011) 8(4):773–86. doi:10.1142/S0219876211002812
24. Li, M, and Wen, PH. Finite block method for transient heat conduction analysis in functionally graded media. Int J Numer Meth Eng (2014) 99(5):372–90. doi:10.1002/nme.4693
25. Fantuzzi, N, Tornabene, F, Viola, E, and Ferreira, AJM. A strong formulation finite element method (SFEM) based on RBF and GDQ techniques for the static and dynamic analyses of laminated plates of arbitrary shape. Meccanica (2014) 49:2503–42. doi:10.1007/s11012-014-0014-y
26. Fantuzzi, N, Dimitri, R, and Tornabene, F. A SFEM-based evaluation of mode-I Stress Intensity Factor in composite structures. Compos Struct (2016) 145:162–85. doi:10.1016/j.compstruct.2016.02.076
27. Gao, XW, Huang, SZ, Cui, M, Ruan, B, Zhu, QH, Yang, K, et al. Element differential method for solving general heat conduction problems. Int J Heat Mass Tran (2017) 115:882–94. doi:10.1016/j.ijheatmasstransfer.2017.08.039
28. Lv, J, Song, C, and Gao, XW. Element differential method for free and forced vibration analysis for solids. Int J Mech Sci (2019) 151:828–41. doi:10.1016/j.ijmecsci.2018.12.032
29. Gao, LF, Gao, XW, Feng, WZ, and Xu, BB. A time domain element differential method for solving electromagnetic wave scattering and radiation problems. Eng Anal Bound Elem (2022) 140:338–47. doi:10.1016/j.enganabound.2022.04.025
30. Zheng, YT, Gao, XW, and Liu, YJ. Numerical modelling of braided ceramic fiber seals by using element differential method. Compos Struct (2023) 304:116461–1. doi:10.1016/j.compstruct.2022.116461
31. Jiang, WW, and Gao, XW. Analysis of thermo-electro-mechanical dynamic behavior of piezoelectric structures based on zonal Galerkin free element method. Eur J Mech A-solid (2023) 99:104939. doi:10.1016/j.euromechsol.2023.104939
32. Moukalled, F, Mangani, L, and Darwish, M. The finite volume method in computational fluid dynamics: An advanced introduction with OpenFOAM® and matlab. Berlin,GER: Springer (2016). 791.
33. Ivankovic, A, Demirdzic, I, Williams, JG, and Leevers, PS. Application of the finite volume method to the analysis of dynamic fracture problems. Int J Fracture (1994) 66(4):357–71. doi:10.1007/BF00018439
34. Cardiff, P, Kara, A, and Ivankovic, A. A large strain finite volume method for orthotropic bodies with general material orientations. Comput Methods Appl Mech Eng (2014) 268:318–35. doi:10.1016/j.cma.2013.09.008
35. Fallah, N, and Parayandeh-Shahrestany, A. A novel finite volume based formulation for the elasto-plastic analysis of plates. Thin Wall Struct (2014) 77:153–64. doi:10.1016/j.tws.2013.09.025
36. Gong, J, Xuan, L, Ming, P, and Zhang, W. An unstructured finite-volume method for transient heat conduction analysis of multilayer functionally graded materials with mixed grids. Numer Heat Tr B (2013) 63(3):222–47. doi:10.1080/10407790.2013.751251
37. Cavalcante, MA, Marques, SP, and Pindera, MJ. Computational aspects of the parametric finite-volume theory for functionally graded materials. Comp Mater Sci (2008) 44(2):422–38. doi:10.1016/j.commatsci.2008.04.006
38. Jasak, H, and Weller, H. Application of the finite volume method and unstructured meshes to linear elasticity. Int J Numer Methods Eng (2000) 48(2):267–87. doi:10.1002/(SICI)1097-0207(20000520)48:2<267::AID-NME884>3.0.CO;2-Q
39. Bailey, C, and Cross, M. A finite volume procedure to solve elastic solid mechanics problems in three dimensions on an unstructured mesh. Int J Numer Methods Eng (1995) 38:1757–76. doi:10.1002/nme.1620381010
40. Charoensuk, J, and Vessakosol, P. A high order control volume finite element procedure for transient heat conduction analysis of functionally graded materials. Heat Mass Tr (2010) 46:1261–76. doi:10.1007/s00231-010-0649-8
42. Gao, XW. The radial integration method for evaluation of domain integrals with boundary-only discretization. Eng Anal Bound Elem (2002) 26:905–16. doi:10.1016/S0955-7997(02)00039-5
43. Nardini, D, and Brebbia, CA. A new approach for free vibration analysis using boundary elements. In: CA Brebbia, editor. Boundary element methods in engineering. Berlin,GER: Springer (1982). 312–26.
44. Gao, XW. A boundary element method without internal cells for two-dimensional and three-dimensional elastoplastic problems. J Appl Mech (2002) 69:154–60. doi:10.1115/1.1433478
45. Liszka, T, and Orkisz, J. The finite difference method at arbitrary irregular grids and its application in applied mechanics. Comput Struct (1980) 11(1-2):83–95. doi:10.1016/0045-7949(80)90149-2
46. Thomas, JW. Numerical partial differential equations: Finite difference methods. Berlin, GER: Springer Science and Business Media (2013). 437.
47. Liu, WK, Belytschko, T, and Chang, H. An arbitrary Lagrangian-Eulerian finite element method for path-dependent materials. Comput Methods Appl Mech Eng (1986) 58:227–45. doi:10.1016/0045-7825(86)90097-6
48. Li, S, and Liu, WK. Meshfree and particle methods and their applications. Appl Mech Rev (2002) 55:1–34. doi:10.1115/1.1431547
49. Li, W, Nguyen-Thanh, N, Huang, J, and Zhou, K. Adaptive analysis of crack propagation in thin-shell structures via an isogeometric-meshfree moving least-squares approach. Comput Methods Appl Mech Eng (2020) 358:112613–3. doi:10.1016/j.cma.2019.112613
50. Wang, DD, Wang, JR, and Wu, JC. Superconvergent gradient smoothing meshfree collocation method. Comput Methods Appl Mech Eng (2018) 340:728–66. doi:10.1016/j.cma.2018.06.021
51. Wang, JG, and Liu, GR. A point interpolation meshless method based on radial basis functions. Int J Numer Methods Eng (2002) 54:1623–48. doi:10.1002/nme.489
52. Hart, EE, Cox, SJ, Djidjeli, K, and Compact, RBF. Compact RBF meshless methods for photonic crystal modelling. J Comput Phys (2011) 230(12):4910–21. doi:10.1016/j.jcp.2011.03.010
53. Zheng, H, Yang, Z, Zhang, CH, and Tyrer, M. A local radial basis function collocation method for band structure computation of phononic crystals with scatterers of arbitrary geometry. Appl Math Model (2018) 60:447–59. doi:10.1016/j.apm.2018.03.023
54. Gao, XW, Liu, XY, Xu, BB, and Cui M& Lv, J. Element differential method with the simplest quadrilateral and hexahedron quadratic elements for solving heat conduction problems. Numer Heat Transfer, B (2018) 73(4):206–24. doi:10.1080/10407790.2018.1461491
55. Gao, XW, Liu, HY, Lv, J, and Cui, M. A novel element differential method for solid mechanical problems using isoparametric triangular and tetrahedral elements. Comput Maths Appl (2019) 78(11):3563–85. doi:10.1016/j.camwa.2019.05.026
56. Lv, J, Zheng, MH, Xu, BB, Zheng, YT, and Gao, XW. Fracture mechanics analysis of functionally graded materials using a mixed collocation element differential method. Eng Fracture Mech (2021) 244:107510. doi:10.1016/j.engfracmech.2020.107510
Keywords: finite element method, finite volume method, boundary element method, mesh free method, free element method, finite line method
Citation: Gao X-W, Jiang W-W, Xu X-B, Liu H-Y, Yang K, Lv J and Cui M (2023) Overview of Advanced Numerical Methods Classified by Operation Dimensions. Aerosp. Res. Commun. 1:11522. doi: 10.3389/arc.2023.11522
Received: 28 April 2023; Accepted: 21 June 2023;
Published: 17 July 2023.
Copyright © 2023 Gao, Jiang, Xu, Liu, Yang, Lv and Cui. This is an open-access article distributed under the terms of the Creative Commons Attribution License (CC BY). The use, distribution or reproduction in other forums is permitted, provided the original author(s) and the copyright owner(s) are credited and that the original publication in this journal is cited, in accordance with accepted academic practice. No use, distribution or reproduction is permitted which does not comply with these terms.
*Correspondence: Xiao-Wei Gao, eHdnYW9AZGx1dC5lZHUuY24=